")

-
Home

-
Study
-
Actualities
- Frontpage
ClassROOM (PK8/009)
Responsible person: Ing. Robert Rakay, PhD.
Location: Park Komenského 8, Main floor, South Entrance
ClassROOM
(PK8/103A,B)
Responsible person: prof. Ing. Michal Kelemen, PhD.
Location: Park Komenského 8, 1st Floor , South Entrance
ClassROOM
(PK8/110B)
Responsible person: Ing. Peter Ján Sinčák, PhD.
Location: Park Komenského 8, 1st Floor , North Entrance
ClassROOM
S (PK8/003-004)
Responsible person: doc. Ing. Ján Semjon, PhD.
Location: Park Komenského 8, Main Floor
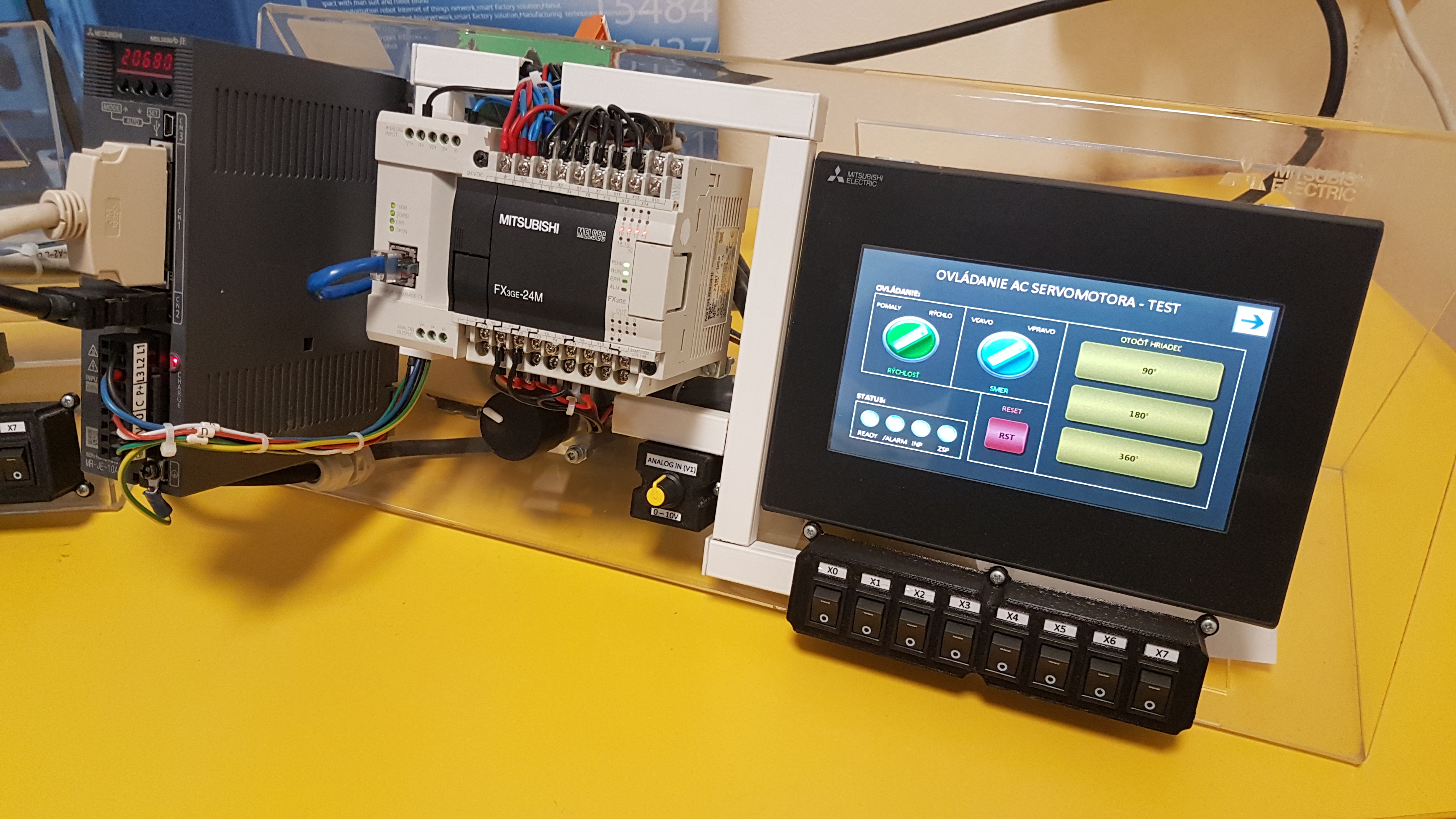
Mitsubishi ELECTRIC
V rámci podpory vzdelávania a výskumu naša katedra nadviazala úzku spoluprácu so Spoločnosťou Mitsubishi Electric. Naše laboratóra sú doplnené o nasledujúce zariadenia priemyselnej automatizácie:
1. Kolaboratívny robot Mitsubishi MELFA ASSISTA
2. Zostavy PLC, HMI, FM, Servo systém v podobe edukačných stendov.
- PLC FX5U
- HMI GOT 2000
- FM D700-SC
- SERVO MELSERVO JE
Za podporu veľmi pekne dakujeme!


Okrem najnovších modelov pracuejeme aj s ďalšími typmi komponentov ako PLC FX3G, HMI GT2107, FM E700, SERVO MRJE10C

Za podporu veľmi pekne dakujeme!
Zodp. osoba: doc. Ing. Marek Vagaš, PhD.
Umiestnenie: Park Komenského 8, 1. posch., južná strana
Vyučované predmety
- Sú zamerané na aplikácie priemyselnej kolaboratívnej robotiky, ako v simulačnom prostredí tak aj na reálne vytvorenom tréningovom pracovisku.
- Pomocou Edukačného stendu študenti majú možnosť zoznámiť sa a pracovať so všetkými hlavnými komponentmi modernej priemyselnej automatizovanej prevádzky od riadenia cez pohony po vizualizáciu a ovládanie automatizovaných systémov.
- Samozrejmosťou je použitie dostupných zariadení počas riešenia semestrálnych, záverečných a výskumných prác.

MiSBOT
Minimálne invazívna chirurgia (MIS) sa rýchlo stáva štandardom pri chirurgických zákrokoch, pričom čoraz väčší podiel chirurgických zákrokov sa vykonáva pomocou laparoskopie. Otvorená chirurgia sa postupne presúva na urgentné stavy, pri ktorých nie je možné plánovanie operácie. Pre chirurgov však ťažkosti s ktorými sa stretávajú pri správnom manévrovaní s nástrojmi v obmedzenom a citlivom pracovnom priestore, ktorý je tvorený vnútornými orgánmi ľudského tela, vytvárajú značné obmedzenia. V posledných rokoch MIS priťahuje čoraz viac pozornosti a to predovšetkým kvôli zníženiu chirurgickej traumy, zníženiu chorobnosti, zníženiu procedurálnych nákladov a zvýšeniu spokojnosti pacientov. Avšak väčšina existujúcich zariadení využívaných pri MIS, sú z pohľadu mechaniky, dokonale tuhé telesá s obmedzeným počtom stupňov voľnosti. Z uvedeného dôvodu je súčasný výskum v celosvetovom meradle v danej vedeckej oblasti zameraný na zvýšenie manipulovateľnosti v takto značne obmedzenom pracovnom priestore. Jednou z možností ako riešiť uvedený deficit je využitie článkovaných kinematicky-redundantných štruktúr či kontinuálnych štruktúr. Kontinuum štruktúry majú teoreticky nekonečný počet stupňov voľnosti, čím signifikantne zvyšujú manipulovateľnosť s daným zariadením a zároveň poskytujú potrebnú bezpečnosť pri chirurgických zákrokoch.
Chirurgický invazívny robot je určený pre monitorovanie brušnej dutiny počas chirurgického zákroku. Je vybavený endoskopickou kamerou s osvetlením, pomocou ktorej je možné sledovať výstup z kamery na monitore. V danej robotickej aplikácii je využitý kolaboratívny kinematicky-redundantný robot, ktorý spĺňa všetky požadované štandardy a je tak určený pre kolaboráciu s človekom. Obsluha robota má možnosť ovládať kolaboratívny robot ako aj jeho koncový člen vo forme kontinuum robota pomocou joysticku. Celý systém je možné riadiť a monitorovať pomocou počítačovej aplikácie.
Video:

