")

Riešime spracovanie dát z V-REPU (CoppeliaRobotics) video (Video_V-Rep.avi) v prílohe, modelu robotického ramena zloženého z URM, do SOLIDU a Matlabu, kvôli kinematickým simuláciám.
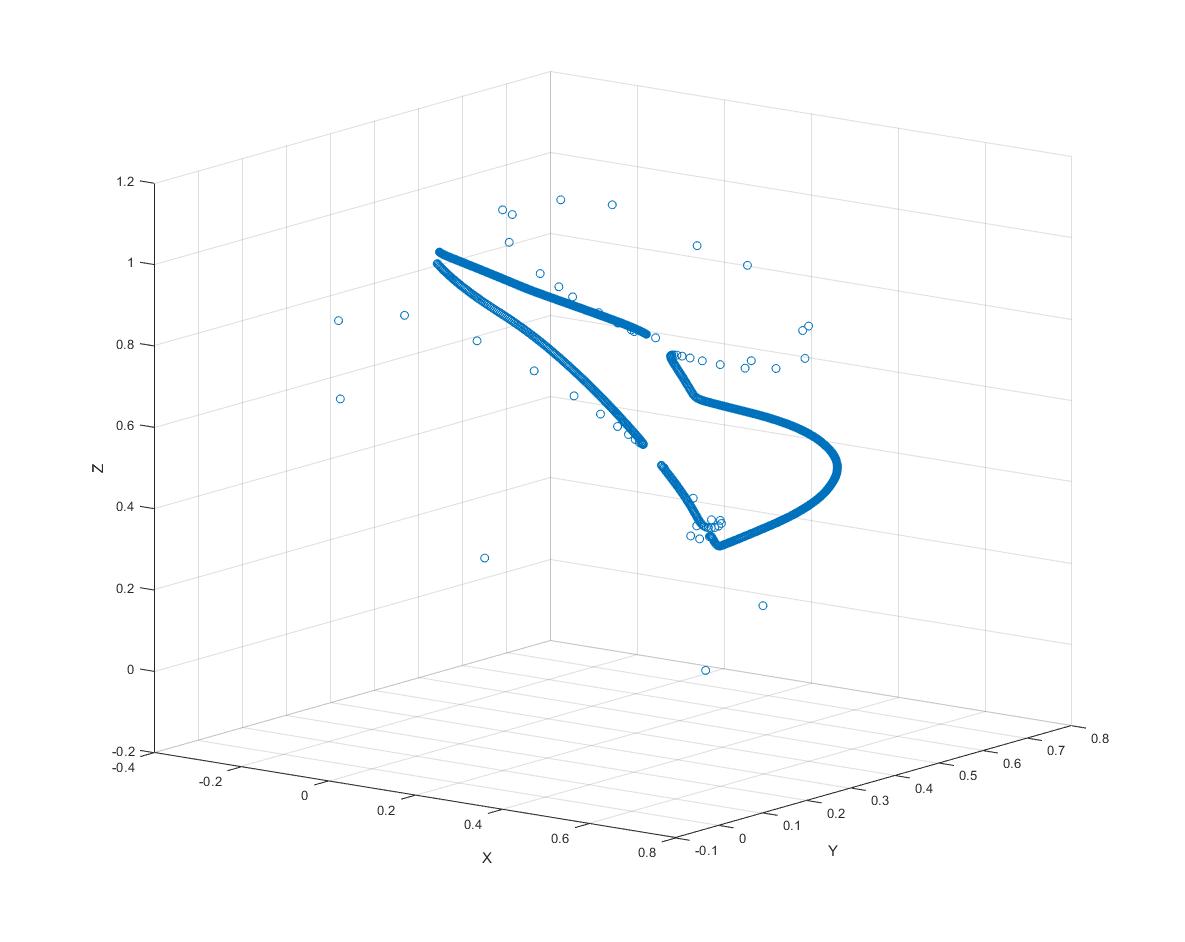
V prílohe je k nahliadnutiu aj video (URM_multibody_kinematics_clanok_3.avi) tej istej trajektórie viz. Príloha (trajektória p7_3.jpg), ale generované už v MATLABE na základe dát z (IK)-inverznej kinematiky prostradia V-Rep, ktoré máme na základe spolupráce s fakultou VŠB-Ostrava.
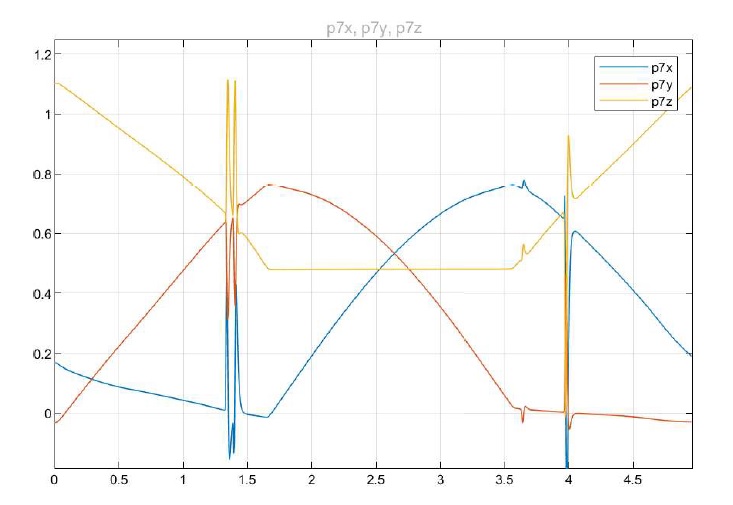
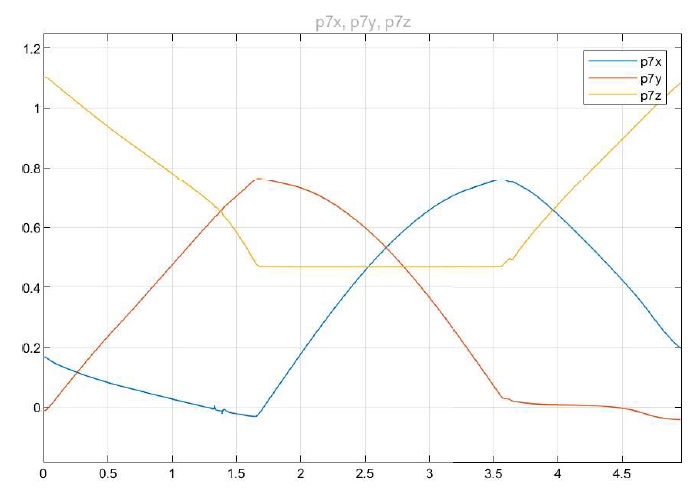
Priložil som aj obrázok trajektórie zložiek polohového vektora (efektora) ,ktorý vykonáva pohyb po predpísanej trajektórii. Dochádza tam však k diskontinuite pohybu kvôli obmedzeniu vo softvéry V-Rep. Tento proces sa dodatočne upravuje v prostredí Simulink. V prílohe:
Trajektórie zložiek polohového vektora efektora_pred úpravou.pdf a Trajektórie zložiek polohového vektora efektora po úprave.pdf. Výsledok tohto spracovania je dobre viditeľný na tvare trajektórie obrázky (trajektória p7_3.jpg)-po úprave a (trajektória p7.jpg)-pred úpravou.